[ Instrument R & D of Instrument Network ] In recent years, researchers around the world have been working hard to develop sensors that can replicate human touch in robots and improve their operating skills. Although some of these sensors have achieved significant results, existing solutions Most of them have small sensitive fields or can only collect low-resolution images. A research team at UC Berkeley recently developed a new type of multi-directional tactile sensor, omnitac, which overcomes some of the limitations of previously developed sensors. A paper published by the research team indicates that it will Acts as an artificial fingertip, allowing the robot to perceive the characteristics of the objects it holds or manipulates.
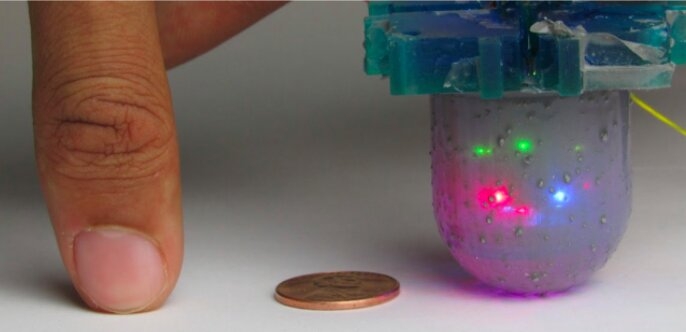
The thumb and cents of the person next to OmniTact: shows the size of the sensor
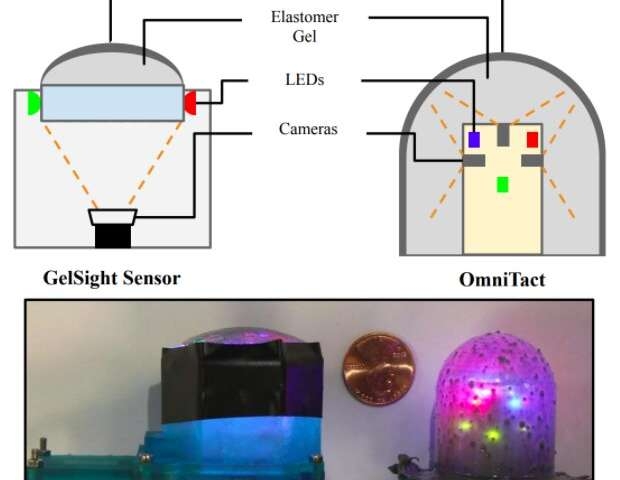
Frederik Ebert, one of the researchers who conducted this research, stated: "Our laboratory recognizes the need for a sensor to perform general robotic operation tasks. Tactile sensors have greater capabilities. Existing tactile sensors are either flat, have a small sensitive field, or only provide low-resolution signals. For example, GelSight sensors can provide high-resolution (ie 400x400 pixels) images, but It is large and flat, providing sensitivity on only one side, while the photoelectric sensor is curved, but only provides force readings at a single point. "
OmniTact is a sensor developed by Ebert and his colleagues. It is an adaptation of a tactile sensor GelSight developed by researchers at MIT and the University of California, Berkeley. GelSight can generate a detailed three-dimensional map of the surface of the object and detect it. Some of its characteristics.
Compared with GelSight, OmniTact is multi-directional, which means that all its sides have perception capabilities. In addition, it can provide high-resolution readings, is highly compact and has a curved shape. When integrated into a claw or robotic hand, the sensor acts like a sensitive artificial "finger", allowing the robot to manipulate and sense objects of various shapes and sizes.
The figure and image illustrate the basic difference between the GelSight sensor and OmniTact.
OmniTact is made by embedding multiple micro cameras into artificial skin made of silicone. The camera detects the multi-directional deformation of the gel skin and generates rich signals, which are then analyzed by computer vision and image processing techniques to infer that the robot is Information about the object being operated.
Akhil Padmanabha, another researcher involved in the study, said: "Our team uses a learning-based approach to take advantage of high-resolution feedback and avoid manual calibration procedures. OmniTact provides touch sensing on all sides of the sensor, allowing the robot to move in any direction Get tactile feedback when they touch. "
Ebert, Padmanaba and their colleagues evaluated the performance of the sensor in a rather challenging task. In this task, the robot must insert the electrical connector into the socket. They also tested it on the finger The ability to infer the contact angle of a finger when pressed against a given object. In these initial evaluations, omnitac has achieved remarkable results, and its performance is better than the tactile sensor sensitive to only one side and the other multi-directional sensor in the state estimation task.
Stephen Tian, ​​another researcher who participated in the study, said: "Through our experiments with OmniTact, we found that multi-directional, high-resolution tactile perception can achieve certain delicate operation tasks, such as the connector insertion task we proposed. We It is suspected that in the future, in addition to applications such as surgical operations and remote operation of robots in marine and space missions, multi-directional tactile sensing may be an essential element of general robot operation. "
The researchers used a miniature camera commonly used in endoscopes to build the sensor, casting silicone directly onto the camera. As a result, OmniTact is much more compact than the previously developed GelSight sensors, so it may have a wider range of applications. In the future, it may pave the way for creating new robots with more complex sensing capabilities.
Padmanaba said: "We plan to make OmniTact cheaper, more compact, and can be used for a wider range of tasks. Our team also plans to conduct more robotic operation research to provide information for future generations of tactile sensors.
Marine Parts
NINGBO RUICAN MACHINERY COMPANY has more than 10 years experiences for Sand Casting. It is including resin and precoated sand casting process. It is widely used in mining industries, shipping parts, Valves, bumps, marine parts, shipping container door locking parts, shipping container corner parts.
1.Heat treating: Normalizing, Quenching, Tempering
2. Surface treating: Shot blasting, Hot Dip Galvanized, Electroplating, Oxidation, powder coating, Passivation.
3. Long time cooperation with many well known world-class corporations such as Samsung, Buhler, Ford Motor, Dhollandia, Emerson and many domestic enterprises.
4. OEM value added service: precise machining and assembling as per drawings or your requirements.